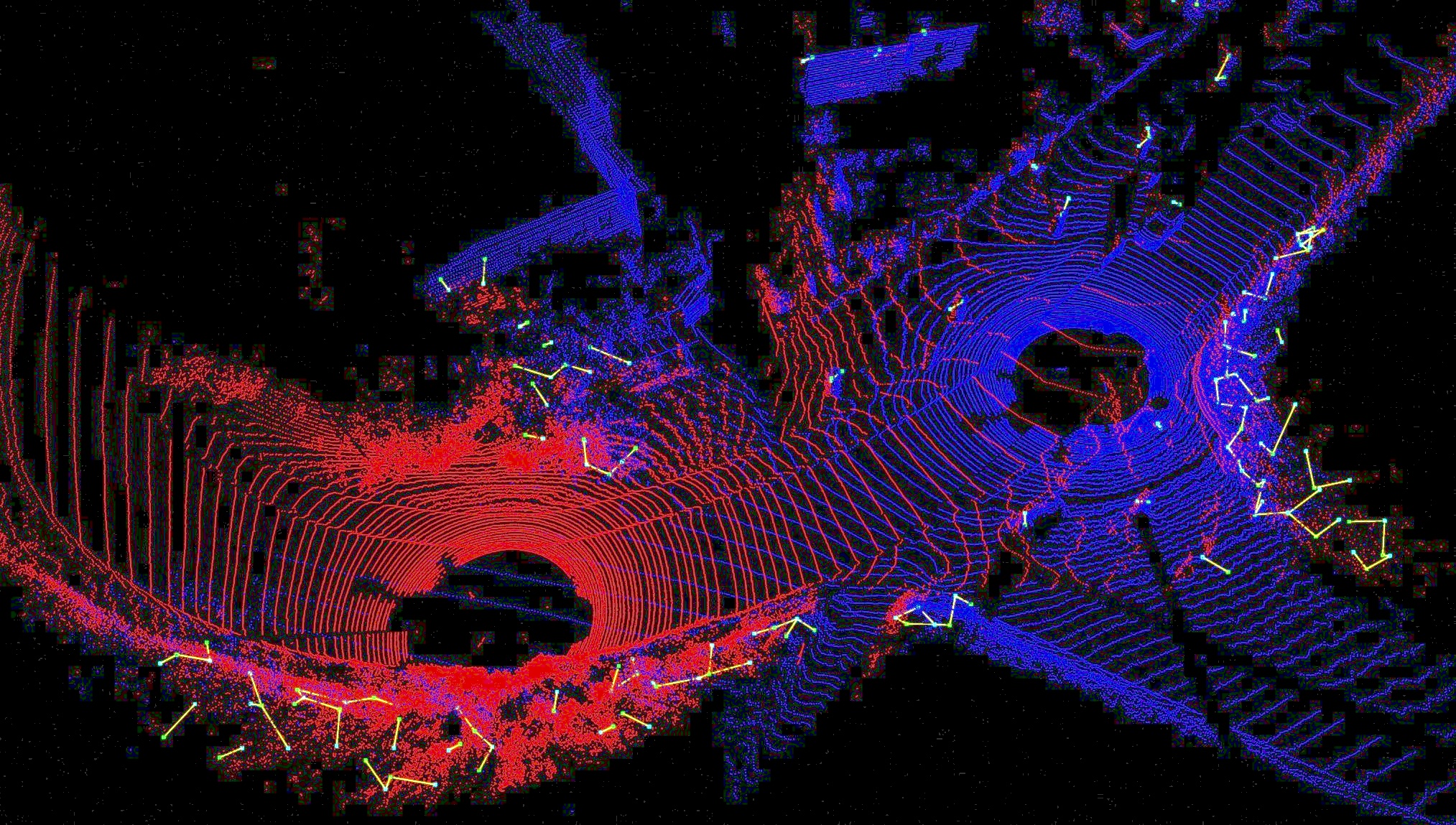
Figure 1: With differentiable GICP algorithm, we can train our neural network to infer importance, or weight, of each point in the point cloud that could be used in later GICP step. In the figure, points with lower weights are rendered in green, and those with higher weights are rendered in red. Note that points on grounds, which often exhibit non-uniform distribution, have generally lower weights than the others.
Abstract
We present a novel algorithm for learning-based loop-closure for SLAM (simultaneous localization and mapping) applications. Our approach is designed for general 3D point cloud data, including those from lidar, and is used to prevent accumulated drift over time for autonomous driving. We voxelize the point clouds into coarse voxels and calculate the overlap to estimate if the vehicle drives in a loop. We perform point-level registration to compute the current pose accurately. Finally, we use factor graphs to modify the poses with different weights along the trajectory of the vehicle to update and modify the map. We have evaluated our approach on well-known datasets KITTI, KITTI-360, Nuscenes, Complex Urban, NCLT, and MulRan. We show more accurate estimation of translation and rotation. On some challenging sequences, our method is the first approach that can obtain a 100% success rate.
Video
Paper
[GeoLCR: Attention-based Geometric Loop Closure and Registration], Under Review.
Jing Liang; Sanghyun Son; Ming Lin; Dinesh Manocha