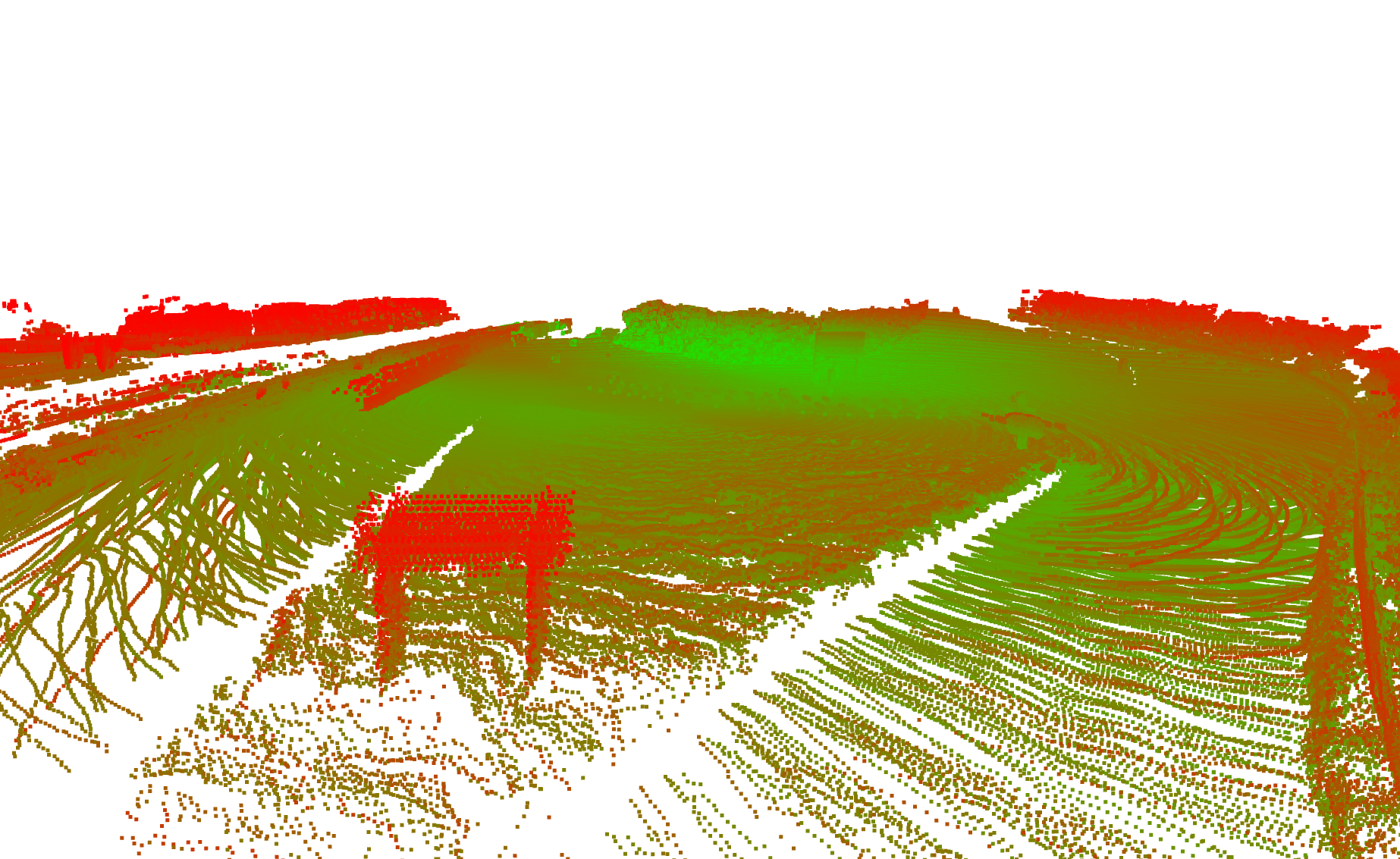
Figure 1: With differentiable GICP algorithm, we can train our neural network to infer importance, or weight, of each point in the point cloud that could be used in later GICP step. In the figure, points with lower weights are rendered in green, and those with higher weights are rendered in red. Note that points on grounds, which often exhibit non-uniform distribution, have generally lower weights than the others.
Abstract
We present a novel differentiable weighted generalized iterative closest point (WGICP) method applicable to general 3D point cloud data, including that from lidar. Our method builds on differentiable generalized ICP (GICP) and we use the differentiable K-Nearest Neighbors (KNN) algorithm to enhance differentiability. Our differentiable GICP algorithm provides the gradient of output pose estimation with respect to each input point. This allows us to train a neural network to predict its importance, or weight, in order to estimate the correct pose. In contrast to the other ICP-based methods, our formulation reduces the number of points used for GICP by only selecting those with the highest weights and ignoring redundant ones with lower weights. We show that our method improves both the accuracy (up to 30%) and the speed (up to 2x) over the GICP algorithm on the KITTI dataset. We also demonstrate the benefit of WGICP in terms of developing an improved SLAM system.
Paper
[WGICP: Differentiable Weighted GICP-Based Lidar Odometry], Under Review.
Sanghyun Son; Jing Liang; Ming Lin; Dinesh Manocha